Back to overview
Subject Directory
Variable discplacement motors for open and closed circuit operation
Standard hydraulic motors at low speeds in their starting phase cannot generate the necessary torque. Therefore, the power of the fast spinning hydraulic motors has to be reduced by means of several step gearboxes down to the speed needed on the wheel. Somewhat higher windage losses and poorer mechanical efficiency are benevolently accepted in this context. Quite the opposite holds true for the motors by LHY Powertrain: The motors of the Series 02 are capable of transmitting the required torque even at low speed and make it possible to start smoothly and sensitively.
Advantages
- jerk-free low speed
- high starting torque
- large conversion range
- zero angle possible
- dynamic response
- PTO through-drive motor
- compact design
- high power density
- high reliability
- long service life
Design characteristics
- axial piston motor in swashplate design for high pressure closed and open circuit systems
- optimized starting and low speed behaviour
- purge valves for circuit and case flushing optional
- stepless or 2-position control
- electric or hydraulic controls
- superposed pressure control optional
- brake pressure shut off optional
- swivelling to 0 cc/rev
- high pressure relief valves available
- through shaft with free shaft end or with coupling flange
- SAE high pressure ports radial or axial
- SAE mounting flange with ANSI or SAE spline shaft
- plug-in version optional
- speed sensor optional
- counter balance valve optional
- double and tandem motor available
Controls
- H1 hydraulic stepless
- H2 hydraulic 2-position
- H4 hydraulic stepless Vmin= 0 cc/rev
- E1 electro-hydraulic stepless
- E2 electro-hydraulic 2-position
- E4 electro-hydraulic stepless Vmin= 0 cc/rev
- E6 as E4 with inverted shifting
- EH1P-CA hydraulic stepless with pressure override and electric pressure selection
Maximum displacement override
- pneumatic
- hydraulic (high and low pressure)
- electric
Technical Data
| HMV-02 | 55 | 75 | 105 | 135 | 165 | 210 | 280 | 105D | 165D | |
|---|---|---|---|---|---|---|---|---|---|---|
| Max.displacement | cc/rev | 54.7 | 75.9 | 105 | 135.6 | 165.6 | 210 | 281.9 | 210 | 331.2 |
| Max. operating speed at Vmax | rpm | 4300 | 3800 | 3700 | 3200 | 3100 | 2700 | 2400 | 3300 | 2900 |
| Max. speed at Vmax* | rpm | 4400 | 4100 | 3800 | 3500 | 3400 | 3000 | 2700 | 3400 | 3100 |
| Max. operating speed at Vmin | rpm | 4700 | 4400 | 4100 | 3700 | 3500 | 3200 | 2900 | 4100 | 3500 |
| Max. speed at Vmin* | rpm | 5300 | 5000 | 4700 | 4000 | 3900 | 3500 | 3200 | 4400 | 3700 |
| Nominal pressure | bar | 450 | 450 | 450 | 450 | 450 | 450 | 450 | 450 | 450 |
| Max. pressure** | bar | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 |
| Output torque (Δp=430bar) | Nm | 374 | 519 | 719 | 928 | 1133 | 1438 | 1929 | 1437 | 2267 |
| Corner power (theor.)*** | kW | 184 | 239 | 309 | 360 | 415 | 482 | 586 | 677 | 878 |
| Weight approx. (without oil) | kg | 28 | 32 | 42 | 56 | 76 | 101 | 146 | 98 | 149 |
* highest transient speed, that can temporarily occur
** highest transient pressure, that can temporarily occur
*** (Vmax x nmax at Vmin x ∆p 430 bar)
** highest transient pressure, that can temporarily occur
*** (Vmax x nmax at Vmin x ∆p 430 bar)
Sectional View of the Variable Displacement Motor
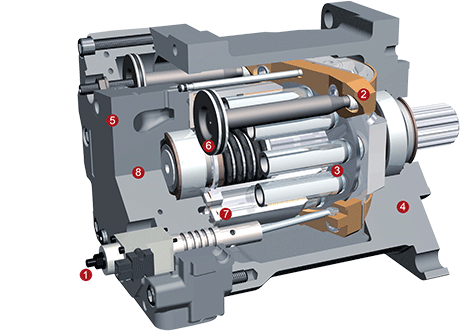
- 1control: optional swashing to 0 cc/rev
- 2swash plate: hydrostatic bearing
- 3piston-slipper assembly: 21° swash angle
- 4housing: monoshell for high rigidity
- 5valve plate housing: highly integrated
- 6control piston: integrated, hydraulically captured
- 7rotating group: precise torque transmission even at low speeds
- 8optional Through-Drive: available with two shaft ends for torque transmission